

「大陸間弾道ミサイル」を言い訳にしてロケットを開発したセルゲイ・コロリョロフ
初期の旧ソ連宇宙開発を主導したセルゲイ・コロリョロフ(1907〜1966)は、月の探査が終生の夢だった。
1950年代、彼は第1設計局(OKB-1)という組織を率いて「R-7」という大陸間弾道ミサイルを開発した。重量3トン超の核弾頭を、アメリカにまで届かせることができる大型ミサイルだ。これだけの能力があると、人工衛星の打ち上げも可能になる。彼はソ連首脳部を説得して衛星を開発。1957年10月4日、R-7によって史上初の人工衛星「スプートニク1号」の打ち上げに成功した。
もちろん彼はロケットが欲しかったのであって、核弾頭をアメリカまで届かせることができる大陸間弾道ミサイルというのは政治向けの言い訳であった。ロケットができれば次は衛星であり、月・惑星探査機であり、有人宇宙船である。ここでもコロリョフは同じ論理を使ってソ連首脳部を説得した。「衛星を打ち上げられるようになれば、国防上便利な通信衛星や偵察衛星も打ち上げて運用することができます。もちろん有人宇宙船や月・惑星の探査は国家の威信を向上させるでしょう」。
その結果、コロリョフのOKB-1の仕事は激増した。ロケットの改良に加えて、通信衛星、偵察衛星を開発し、並行して有人宇宙船も月・惑星探査機も開発しなければならなくなったのだ。結局、1965年になって月・惑星向けの探査機の開発は、ラヴォーチキン設計局に譲らざるを得なくなった。
その時コロリョフは「私は同志諸君に我が夢の殆どをやろう」と言ったと伝えられる。その10カ月後、コロリョフはガンの手術の予後不良で死去した。
誰も見たことのなかった月の裏側を知るために
このような経緯があったので、初期のソ連の月探査機は、OKB-1が設計、製造したものだった。
最初の月探査機「ルナ1/2号」月面への人工物体到達を目的としたもので、最小限の科学観測機器しか積んでいなかった。1号は月を外して飛び去り、結果として太陽を巡る軌道に入って史上初の惑星間軌道を巡る人工物体となった。ルナ2号は1959年9月14日、月面晴れの海に激突し、月面に到達した史上初の人工物体となった。
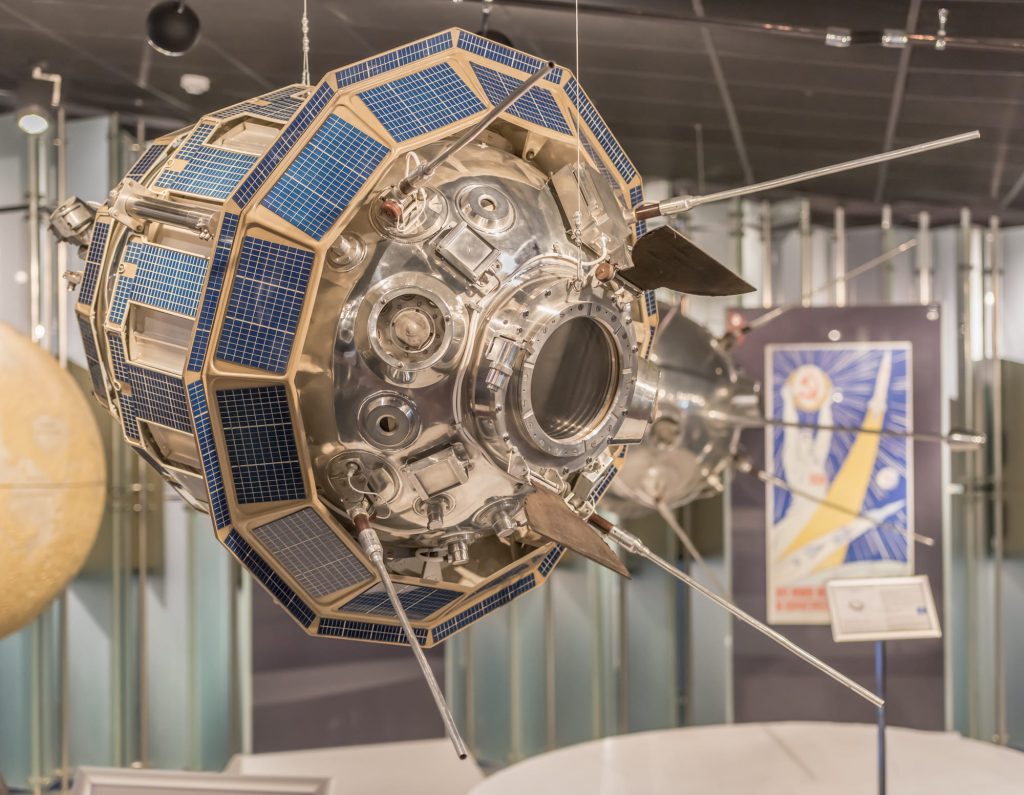
続く「ルナ3号」は、月の裏側の撮影を目的としていた。月は常に地球に同じ半球を向け続けており、有史以来裏側を見た者はいなかった。その裏側に探査機を送り込んで、撮影しようというのである。そのために、ルナ3号は当時の技術の粋をこらして設計された。
ルナ3号のために月の撮影を担当するのは、このために開発された「エニセイ-2」という写真撮影・伝送装置だ。実際に撮影を行うのは焦点距離200mmと500mmの2本のレンズを装着したフィルムカメラ。月の裏側を撮影した露光済みフィルムは、現像液や定着液を含ませたスポンジローラーの間を通ることで現像される。現像したフィルムは、光電管を使ったスキャナーでスキャンして電気信号に変換し、その電気信号を地球に送信するという仕組みである。
エニセイ-2のカメラはルナ3号本体に固定されている。だから、月の裏側を撮影するためにはルナ3号本体をカメラが月を向く姿勢で安定するように制御する必要がある。宇宙空間で衛星・探査機の姿勢を制御する方法は基本的に2つ、スピン安定と三軸安定だ。�スピン安定は、衛星・探査機本体をコマのように回転させて姿勢を安定させる方法、三軸安定は内部にジャイロを搭載したりガスを噴射したりして、衛星・探査機自体は回転せずに姿勢を安定させるというものだ。技術的には三軸安定の方が難しい。
ルナ3号の場合、本体に固定したエニセイ-2のカメラレンズを月面に向けるためには、機体を三軸安定させる必要がある。ルナ3号は、大陽の方向を検知する大陽センサーと圧縮窒素ガスを噴射するスラスターで姿勢を安定させる。
撮影の条件は、太陽光が月の裏側に当たっていること。だからルナ3号は、地球・月・太陽がこの順番で並んでいる時に、月の裏側上空を通過するタイミングで打ち上げる。
ルナ3号はラジコンで操作された
月までの飛行では、ルナ3号は回転してスピン安定の状態で飛行する。月に最接近したタイミングで回転を止めて三軸安定に移行。この時、レンズが向いているのと反対側の面を大陽に向ける姿勢で三軸安定となる。すると、自ずとエニセイ-2のカメラレンズが月面を向くことになる。
月の裏側がカメラの視野に入ったことは、カメラ側の面につけた太陽電池で検知する。月面で反射した太陽光が太陽電池に当たると起電力が発生する。これがトリガーとなって、エニセイ-2が撮影を開始する。
また、ルナ3号は、史上初めて他天体の重力を使って軌道変更するスイングバイを軌道計画に盛り込んだ探査機となった。ルナ3号は月の南極側から月の裏側に回り込み、南から北へと月の裏側を横断しながら撮影を行う。この時同時に月の重力に引っ張られて軌道が変わり、再度地球近くに戻ってくる長楕円軌道に入る。ルナ3号が地球に近づくと、それだけ同探査機が送信する電波が地上で受信しやすくなる。画像データをうまく受信できる確率が高まるわけだ。
このように、当時の技術の粋を詰め込んだルナ3号だったが、基本的な動作はすべて地上からのコマンド送信で行う仕組みだった。わかりやすく言えば、地上局から宇宙のルナ3号をラジコンで操作するわけである。
地球と月の平均距離は38万km。電波の通信が往復するのに、およそ3秒弱かかる。つまり3秒以内の事態の急変でなければ、地上からの操作で対応が可能だ。ラジコンでもなんとか探査機を運用できるという判断だったのである。
1959年10月4日に打ち上げられたルナ3号は、10月6日に月の南極上空で月に最接近。翌7日に月の裏側に回り込み、40分��にわたって29枚の写真の撮影に成功した。撮影データの送信は、10月8日に始まり18日までに17枚の画像の受信に成功した。22日には機器に何らかのトラブルが発生して通信が途絶し、ルナ3号のミッションは終了した。
ルナ3号の送ってきたデータで、人類は初めて月の裏側を見ることができた。それは溶岩の広がる「海」の地域がほとんどない、クレーターと山が連なる、表側とは全く異なる地形だった。
宇宙を飛ぶ探査機ならば、3秒程度の通信の時間遅れは大した障害ではない。必要な動作の大部分は事前に分かっているので、予めタイマーを使って仕込んでおくか、あるいは時差を計算した上でコマンドを送信すればいい。が、これが自動車の運転となると3秒の遅れは致命的だ。もしもラジコン自動車の通信時間に3秒の遅延が入るとなると、その運転は至難の業となる。3秒後に曲がるカーブを予測して3秒前にハンドルを切っておかなくてはならないからだ。
が、これも、「ラジコン自動車をうんとゆっくり走らせ」、かつ「運転者が練習を重ねて3秒の遅れに十分に慣れていれば」なんとか対応することが可能となる。
20秒に1枚だけ送られてくる画像を見ながら、月を走る躯体を操作する
旧ソ連は、1971年11月、月着陸機「ルナ17号」で無人月探査車「ルノホート1号」を月面雨の海に送り込んだ。世界で初めて他の天体を走行した無人探査車である。設計・開発はコロリョフのOKB-1から月・惑星探査機の開発を引き継いだラヴォーチキン設計局。開発の先頭に立ったのは、アレクサンダー・ケマルジャン(1921〜2003)という技術者だった。ケマルジャンは第二次世界大戦に戦車兵として従軍した経験を持ち、戦後は軍用ホバークラフトの開発などに従事していた。ルノホートの開発がきっかけとなって、その後火星表面を走行する車両も開発。1986年のチェルノブイリ原子力発電所の爆発事故では、事態収拾のための高放射線環境下で動作する土木車両の開発も行った。
ルノホート1号は重量756kg、8輪の車輪をモーター駆動する無人探査車で、機能を停止する翌71年10月までの11カ月の間に1万540m、つまり10km以上を走行し、科学観測を実施した。
ルノホートの操縦もまたラジコンであった。十分な訓練を受けた5人一組の操縦チームが専用のコンソールを使用して操縦する。操縦チームは2組養成され、交代で操縦を担当した。
チームは、「コマンダー」「ドライバー」「ナビゲーター」「エンジニア」「無線オペレーター」で構成される。コマンダーが全体を統括し、実際の運転はドライバーが行う。ナビゲーターはこれからルノホートが向かう方向を指示し、エンジニアは通信で送られてくる車体各所の状況を監視して異常に備える。無線オペレーターは通信の維持を担当する。ルノホートの高利得アンテナは自動で地球方向を追尾する仕組みを持っておらず、車体の向きに合わせて無線オペレーターが操作して地球に向けるというものだった。
実際の走行はかなりのストレスに満ちたものだったそうだ。ルノホートからの画像は20秒に1枚しか送信されてこない。それも現在の高精細テレビから考えると、ずいぶんときめの粗い画像である。ナビゲーターはそれを頼りに走行する方向を指示し、ドライバーもまた20秒に1枚の画像を使ってそろそろとルノホートを進めていかなければならなかったのである。
1973年1月には2台目の「ルノホート2号」が「ルナ21号」によって、月の北半球にあるル・モニエ・クレーターの内部に送り込まれた。ルノホート2号は1号よりも科学観測能力が強化されており、重量は840kgに増えていた。その後6月4日に機能を停止するまでに、ルノホート2号は37kmを走破した。これは2004年1月にアメリカが火星に送り込んだ無人探査車「オポチュニティ」が2014年7月に破るまで、44年間に渡って地球意外の星の上を走行した車両の走行距離の世界記録であった。
難しいことを成し遂げるためには、人と機械が緊密に協力すること
1972年12月、アメリカはアポロ計画最後の有人月着陸ミッション「アポロ17号」を月に送った。アポロ17号は異例ずくめのミッションだった。登場した宇宙飛行士は、ユージン・サーナン船長、ロナルド・エヴァンス司令船パイロット、ハリソン・シュミット月着陸船パイロットの3名。サーナンとエヴァンズは海軍の軍人だったが、シュミットは民間人の地質学者だった。アポロ計画当初から、アメリカの地質科学者達は地質学者の月派遣を主張してきたが、この最後のミッションでやっと実現したのである。
着陸地は山岳地域のタウルス・リトロウ渓��谷。それまでアポロ月着陸船は着陸時のリスクが小さい平地に着陸していた。が、山岳地域に行かないと採取できない岩石サンプルがある、と地質学者達は主張してきた。最後の最後になって、「地質学者が月に行き、今までに行ったことのない月の山岳地域でサンプルの採集」を行うことになったのだ。
月面での滞在時間は、アポロ計画最長の3日3時間。この間に、サーナン/シュミット両飛行士は、115kgの岩石サンプルを採取した。これもまたアポロ計画での最大であった。
3日間の滞在期間中、両宇宙飛行士は月面車「LRV」を4時間26分運転した。そのたった4時間半ほどでのLRVの走行距離は35.89kmと、ルノホート2号が5カ月かけて走行した距離に迫るものだった。人が月に行って運転すれば、これほどまでに高速に走ることができるのである。
LRVは最後に、サーナンの運転で、月着陸船から150mほど離れた場所に、搭載してあるテレビカメラを月着陸船に向けて設置した。月から飛び立つ月着陸船の上昇段を撮影するためである。カメラのコントロールは、地上からの遠隔操作、つまりラジコンで行う。
同じ試みは、LRVを搭載したアポロ15号と16号でも行われていた。が、15号の時はカメラを動かすモーターが焼き切れて失敗し、16号ではLRVを駐車する位置を間違えたために失敗した。17号は最後の撮影のチャンスとなる。地上では事前にカメラをどのように操作すればきれいに上昇する月着陸船を撮影できるかが検討され、一連のコマンド列が作成された。
管制を行うジョンソン宇宙センターで、事前に作っておいたコマンドの送信を担当したのは、エドワード・フェンデルというエン�ジニアだった。彼は月からの離陸の秒読みを聞きつつ、ちょうど3秒前にコマンドを送信した。
結果は大成功だった。LRVのカメラからは、月から上昇する月着陸船上昇段を完璧なタイミングの向きとズーミングで撮影した映像が送信されてきた。
フェンデルらは、3回目にして最後のチャンスを完全にものにした。これは機械だけではできない、もちろん人間だけでもできない、人と機械の緊密な協力があってはじめて得られた映像だった。
参照リンク
・the Luna 3 spacecraft
・Luna 17/Lunokhod 1 – Spacecraft
・Luna 21/Lunokhod 2
・Apollo 17 – NASA
・Apollo 17 Liftoff from Moon – December 14, 1972









